CMU 15-445 Project 1 - Buffer Pool(2022 Fall)
写在前面
对于还未完全实现的同学们,切忌直接面向测试编程!在着手实现前,一定要想好需要实现的函数的框架,以及其需要满足的功能。有一些功能的实现是需要对buffer pool有一定的理解,而不是简单地根据注释中的guideline就上手做,对于需要实现的功能有一定的理解再去实现能大大减少debug的时间。(说来都是泪呀…)
此外,Project 1需要实现下面三个task:
Extendible Hash Table:可扩展哈希表LRU-K Replacement Policy:基于LRU-K的页替换策略Buffer Pool Manager Instance:管理上面所实现的1、2,实现buffer pool的基础操作
Extendible Hash Table
定义
先明确可扩展哈希表的定义,首先它是一个可以存储key-value键值对的数据结构,由一个可延长的链表加上对应的Bucket实现。可见Extendible Hashing (Dynamic approach to DBMS) - GeeksforGeeks中的详细解释。
为什么用?
了解了可扩展哈希表的定义后,知道为什么使用可扩展哈希表也是很重要的。对于普通的使用拉链法实现的哈希表,如果对于某一哈希值其链出的Bucket数目很多,这种情况下的检索效率最坏是线性的,即_O_(_n_)的时间复杂度。
此时Extendible Hash Table从天而降,通过引入“全局深度”(global depth)和“局部深度”(local depth)的概念解决了这种问题,它通过对Bucket的长度和“平衡度”进行设定,在扩展时只需对需要分裂的Bucket操作即可。
实现细节
根据注释,可以先将对应的Bucket中的增删改查部分实现,方便后续外部实现。
对于整个部分比较tricky的地方在于,当对于新插入Bucket中的key-value,需要先检查Bucket是否已经满了,满的话则需要比较global depth和local depth的关系进而看是否需要扩展哈希表的directory(满的话Bucket是必分裂的,这个无序讨论)。如果需要扩展directory的话,对于新的directory中如何指向Bucket又是一个问题。
因此出现了以下问题:
- 插入时Bucket满时global depth和local depth相等于否带来的directory扩展问题
- 插入时Bucket满且directory扩展后的指向问题
- Bucket分裂后directory的指向问题
对于1,直接判断两者大小然后看扩展与否即可,可以使用vector中的reserve函数来预定原大小的一倍
对于2,由于directory的指向是与global depth有之间关联的(看IndexOf函数可以得出),因此对于未扩展之前的directory其最低global depth个位应当是一一对应的,扩展后directory大小翻了一倍,即新出现的directory与原directory中对应的最低global depth位应是相等的,变化的只有前面的一个最高位0/1,因此新扩展后的directory直接按需指向前面对应directory的Bucket即可
对于3,分裂时可以新建两个Bucket,比较两者不同的思路与2基本相同,只是将global depth换成了local depth,之后分配directory指针即可
LRU-K Replacement Policy
定义
在基础的LRU算法中,每次都是对最近最久未使用页面进行替换出去。但倘若一个短时间内有一个很长的访问序列到来且使用这一次,将原本可能会常用的缓存给替换了出去,进而会影响到后面的缓存击中率,这就是缓存污染问题。
为了解决这一问题,LRU-K出现了,它的思想是对于最近最久第K次未使用页面替换。感觉解释起来有点抽象,其实其本质就是对于未访问到K次的元素,有替换需求时直接用**FIFO**换出去;达到K次的元素缓存起来,根据**LRU**换出去。
实现细节
本来我打算使用优先队列对其进行实现,但过程中我发现C++中的优先队列尤其难用,遂使用一个历史队列(存未到达K次的元素)和一个缓存队列(存到达K次的元素)来实现,其中为了避免每次找对应frame_id时都需要对两个队列进行遍历,这里定义了一个map用来映射frame_id到frame之间的关系:
1 | struct FrameEntry { |
这里比较坑的应该是抛出异常时,如果直接throw加字符串异常信息的话,autograder里面会报”Subprocess aborted Exception”,我这里使用了std::invalid_argument来处理异常。
此外,当使用iterator遍历时,如果需要删除对应的iterator,记得使用std::next或者it++以防止出现use after free这种低级错误。(唉,留下了不熟悉C++的眼泪)
Buffer Pool Manager Instance
定义
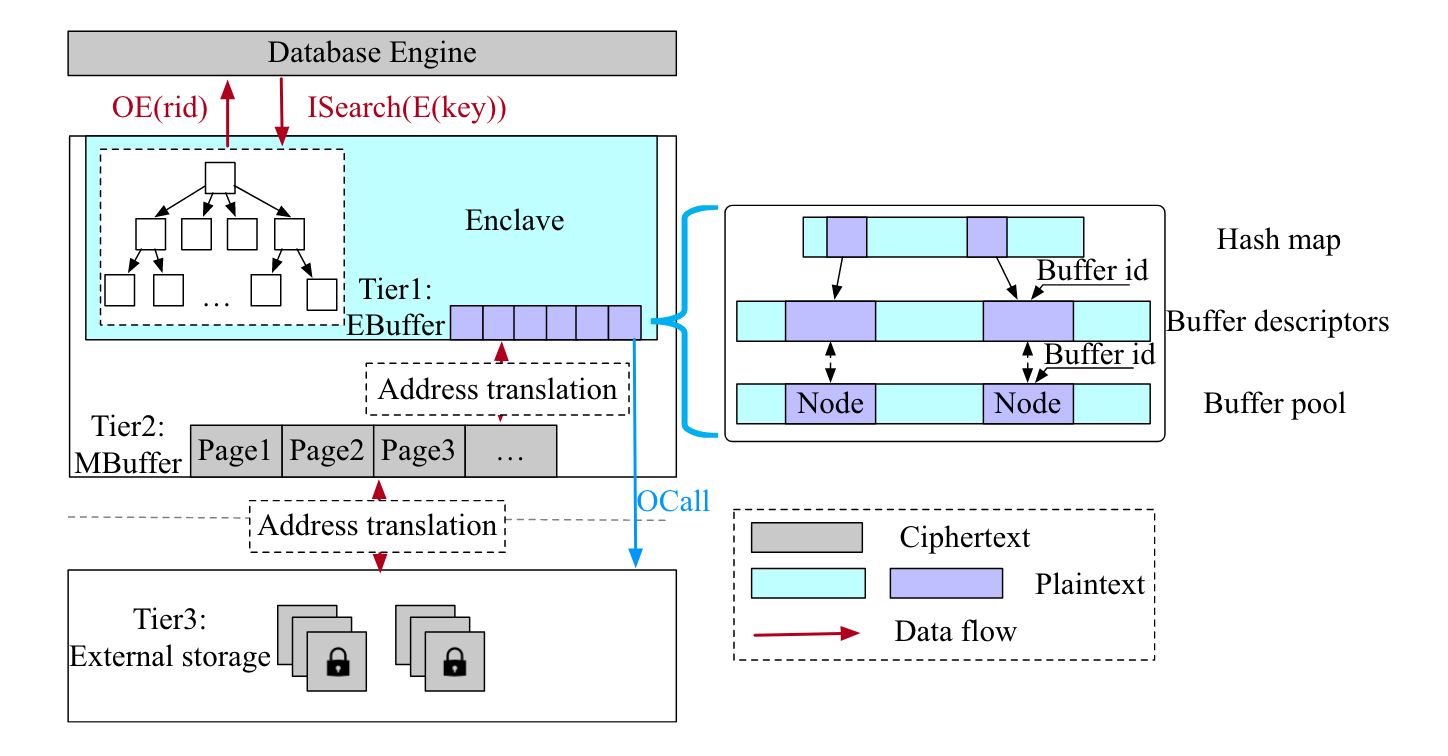
关于buffer pool的定义,其可以简单理解为一个管理内存和磁盘之间数据流动的媒介。这里我更倾向于关注为什么要使用buffer pool而不是mmap,Andy在课上狂喷mmap并且在2022年出了一篇paper详细讲述为什么不要使用mmap的原因,后面抽空读一下再写(给自己挖坑- -!)
实现细节
这一节的实现主要是将上面实现后的两部分结合起来,因此在写这个部分之前我强烈建议先去autograder把前面两个完全通过再写(因为本地测试案例实在是太少了!而且测试用例还不开放>_<)
理解其中一部分变量的定义会更方便实现,free_list_是保存buffer_pool中可用的frame_id;pages_是实际存放frame的地方(不懂的话见之前buffer pool笔记);page_table_保存了page_id到frame_id的映射,方便通过page_id找到对应的frame。
这一部分在实现过程中有小坑,比如:
NewPgImp中,如果失败要记得给page_id返回nullptr- 调用replacer时先
RecordAccess再SetEvictable(可能是我实现方式的问题?这个地方我debug了好久) UnPinPgImg中,如果page原先是dirty的话是不能将其变成非dirty的DeletePgImg中,如果page是脏的则需要先写到disk上再进行metadata的重新设置
感受
相比于Project 0,Project 1的难度和复杂度立马上来了。不同于网上2-3天做完的大佬,我个人大概花了4-5天的时间完成,又花了3-4天debug,一度让我想放弃,不过最终还是磨了下来。听说接下来的B+树更是噩梦,那就走着瞧吧~